 Hi friends, I hope all of you are having fun in your life. In today’s tutorial, we will have a look at what is the Equivalent Circuit of Induction Motor. The working of the induction motor depends on the current and voltage induced by the stating part of motor. This phenomenon is like working of the transformer in which primary winding induced a voltage in the secondary winding. In the case of the motor, the stator is primary and the rotor is secondary. As the working process of the induction motor is like the working of a transformer so its circuit will also be like the transformer. Induction motor is also named as the single-excited motor, as input is provided at the stating part of the motor.
Hi friends, I hope all of you are having fun in your life. In today’s tutorial, we will have a look at what is the Equivalent Circuit of Induction Motor. The working of the induction motor depends on the current and voltage induced by the stating part of motor. This phenomenon is like working of the transformer in which primary winding induced a voltage in the secondary winding. In the case of the motor, the stator is primary and the rotor is secondary. As the working process of the induction motor is like the working of a transformer so its circuit will also be like the transformer. Induction motor is also named as the single-excited motor, as input is provided at the stating part of the motor.
Since an induction motor does not have a self-governing field circuitry, its circuit will not comprise an interior voltage source like the inner produced voltage EA, in a synchronous motor that exists. lt is probable to design the correspondent (equivalent) circuitry of an induction motor from the information of transformers. So, let get started with a What is the Equivalent Circuit of Induction Motor.
What is the Equivalent Circuit of Induction Motor
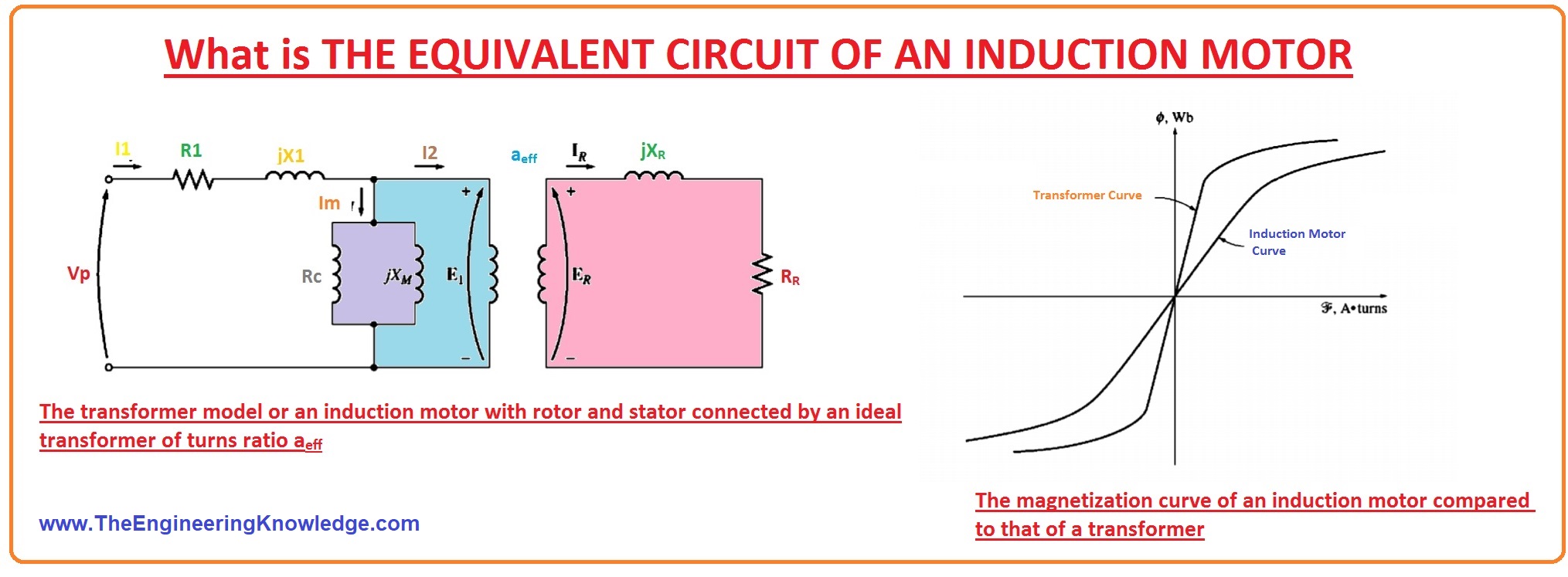
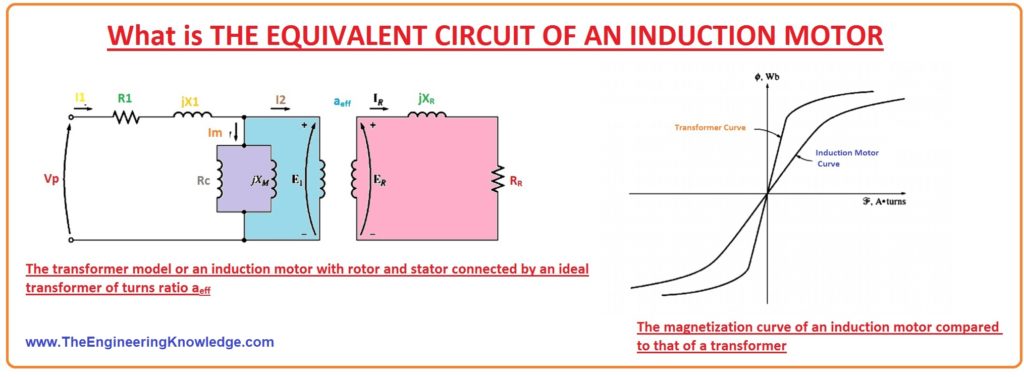
- The equivalent circuitry of an induction motor similar to the transformer is shown in the diagram.
- There will be a specific value of resistance and reactance at stating part of the induction motor.
- The resistance of the stator is represented by (R1) and leakage reactance of stator is denoted as (X1) in the circuit.
- These two parameters are linked on the right side of the circuitry.
- Like the transformer, the induced flux in the motor is directly proportional to the applied voltage.
- The magnetized curve of the induction motor is compared with the curve of the transformer, this curve is among the magnetic force and induced flux.
- We can observe from this curve that the slop of the induction motor curve is lower than the transformer curve.
- It is because there is an air opening (gap) in an induction motor, which significantly upsurges the reluctance of the route of flux and decreases the link among stator and rotor.
- The larger reluctance produced by the air gap indicates that a larger magnetizing current (Im) is compulsory to find a certain flux point.
- Consequently, the magnetizing reactance (XM) in the correspondent circuitry will have a lesser value like a transformer.
- The primary interior stator voltage (E1) is joined to the secondary (ER) having turn ratio (aeff).
- In the case of the motor, these turns are the ratio of conductive bars per-phase on the stator to the conductor per-phase on the rotor.
- It is somewhat challenging to get (aeff ) certainly in the cage rotor since there are no discrete windings on the cage rotor.
- In any circumstance, there is an active turns ratio for the motor.
- The voltage (ER ) induced in the rotor generates a current in the short rotor circuitry of the motor.
- The impedance at primary (stator) and the magnetization current (Im) of the motor are alike to the equivalent components in a transformer corresponding circuitry.
- The circuit of the motor varies from a transformer correspondent circuitry mainly in the belongings of variable rotor frequency at voltage rotor (ER ) and the rotor impedance’s (RR) and (jXR ).
Rotor Circuit Model of Induction Motor
- When the input supply is provided at the stating part of the induction motor, then emf induced in the rotating part of motor, the larger the comparative motion among the rotor and the stator field, the larger the resultant induced voltage at the rotor.
- The greater comparative motion exists when the rotor is motionless, named as the locked-rotor, thus the higher voltage and rotor frequency (f) is produced in the rotor at that state.
- The minimum voltage (zero V) and frequency (zero Hz) produced when the rotor rotates at a similar speed as the stator field, resultant in no comparative (relative) motion.
- The amount the voltage produced in the rotor at any speed level among these maximum points is direct proportion to the slip (S) of the rotor.
- Consequently, if the amount of the voltage produced at locked-rotor situations is named as (ERO) the quantity of the produced voltage at any slip value can be found by the given equation.
ER = SERO ——– (1)
- The values of the frequency of induced voltage are found by the given equation.
fr = Sfe ————(2)
- The voltage (emf) produced at the rotor has resistance (RR) and reactance (x). The value of resistance of rotor (RR) has a constant value and it’s not affected by the slip, but the reactance of the rotor is affected by the slip.
- The reactance (x) of a motor’s rotor relies on the inductance of the rotor and produces a current (I) and voltage (V) frequency. The reactance of the rotor is given by the formula.
XR = wrLR = 2πfrLR ———–(3)
- If we put the value of fr from equation (1) in the equation (3) then we get.
XR= 2πSfeLR = s(2πfeLR) = sXRO ——— (4)
- In equation (4) XRO is the reactance of locked-rotor.
- The resultant rotor corresponding circuitry is revealed in a given diagram. The rotor moving current can be found by using this circuitry.
IR =ER/(RR +jXR) —–(5)
- In equation (5) putting the value of XR from the equation (4). Then we get
IR = ER/(RR +jsXRo) —(6)
- It can also be written as
IR = ERo/(RR/s +jXRo)—-(7)
- Note from Equation (7) that it is conceivable to handle all the rotor factors due to variable rotor speed as produced by a variable impedance (Z) provided with power from a continuous voltage supply (ERO).
- The impedance of the rotor can be found by the given equation.
Zeq =RR/S +jXRo
- The rotor correspondent circuitry using this description is drawn in a given diagram and denoted by B.
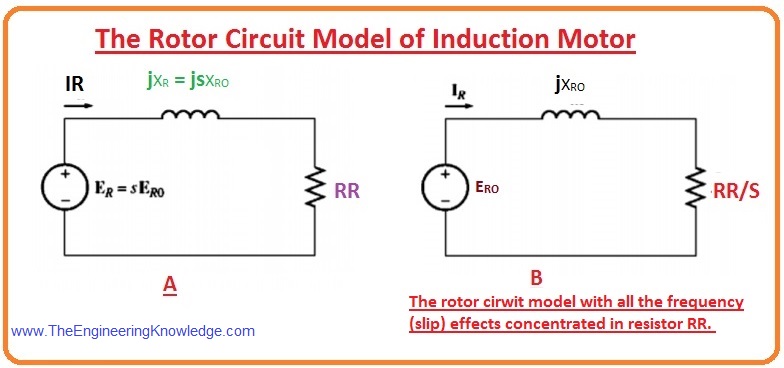
- In that circuit which is represented by B in a diagram, the value of the rotor voltage is ERO and impedance (Z) of the rotor is Zeq.
- A graph of moving current in the rotor is shown in a given diagram.
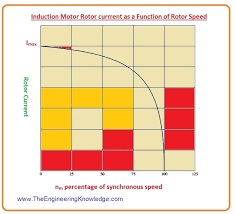
- From this graph, we can observe that the low value of slip resistance becomes RR/s>> XRO .
- So, the rotor resistor prevails and the rotor current (I) fluctuates linearly with slip (S).
- At the higher values of slip (S) XRO higher than the RR/S and the rotor current (I) lines stable condition values as the slip (S) converts (becomes) very larger.
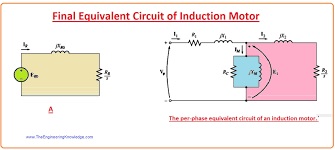
Final Equivalent Circuit of Induction Motor
- To make the concluding per-ø correspondent circuitry for an induction motor (IM), it is essential to mention the rotor portion of the motor over to the stating part.
- We can see in the figure that the circuit mention as A, will be referred to the stator portion.
- In a normal transformer, the voltage (V), currents (I), and impedance (Z) on the secondary portion of the motor can be denoted (referred) to the primary part by the ratio of turns.
Vp = Vs’= aVs —-(1)
Ip= Is’= Is/a—–(2)
Zs’ = a2 Zs—–(3)
- In all these three-equation prime sign indicates the referred values of voltage (V), currents (I), and impedances (Z).
- This type of alteration can be done for the rotor circuit of the induction motor.
- If the ratio of turns in an induction motor is aeff the altered or transformed rotor voltage is now as.
E1= E’R = aeffERO —–(A)
- The rotor current will be.
I2 = IR / aeff
- The impedance of the rotor will be.
Z2 = a2eff (RR /S +jXRO )
- And also, we get
R2 = a2eff RR
X2 = a2eff RRO
- The final transformed circuit is shown in figure.
- The values of a resistor of rotor RR and blocked rotor reactance XRO are very challenging to calculate in the case of a cage rotor and the ratio of turns is also to calculate for this kind of rotor.
- Luckily, however, it is likely to do some calculations which will easily give the referred (denoted) resistance and reactance (R2) and (X2), however, the values of RR, XRO, and aeff are not recognized distinctly.
So it is the complete article on the equivalent circuit of the induction motor if you have any questions ask in the comments. For further understanding of the equivalent circuit of an induction motor, you can read the tutorial on the three-phase induction motor. See you in the next post. Have a good day.
You can also read some related articles to the induction motor. That is described here.



Sweet blog! I found it while surfing around on Yahoo News. Do you have any tips on how to get listed in Yahoo News? I’ve been trying for a while but I never seem to get there! Cheers