Hello, readers welcome to the new interesting post. In this post, we will have a detailed look at Introduction to Stepper Motor. It is an electromechanical electrical machine that used to transform electrical energy in . In this post, we will have a detailed look at Introduction to Stepper Motor. It is an electromechanical electrical machine that used to transform electrical energy in the mechanical energy. There is no need of brushes for this machine amechanical energy. There is no need of brushes for this machine and it also called an electrical motor type that can do the division of complete rotation in different steps so it called a stepper motor.
Hello, readers welcome to the new interesting post. In this post, we will have a detailed look at Introduction to Stepper Motor. It is an electromechanical electrical machine that used to transform electrical energy in . In this post, we will have a detailed look at Introduction to Stepper Motor. It is an electromechanical electrical machine that used to transform electrical energy in the mechanical energy. There is no need of brushes for this machine amechanical energy. There is no need of brushes for this machine and it also called an electrical motor type that can do the division of complete rotation in different steps so it called a stepper motor.
Its structure is like the reluctance motor. The rotating direction of this motor can be regulated without any certain type of circuitry. In this post, we will discuss its working, applications, and related parameters.
Introduction to Stepper Motor
- The stepper motor is a category of synchronous motor that created to move at a certain number if degrees for each electrical pulse provided through a control device.
- The angle of rotation for one pulse is 7.5 or 15 degrees. It mostly used in different controlling networks as the rotation of shaft or diffent part of machines can be regulated accurately through this motor.
- The basic stepper motor and it resultant controlling device can be seen here.
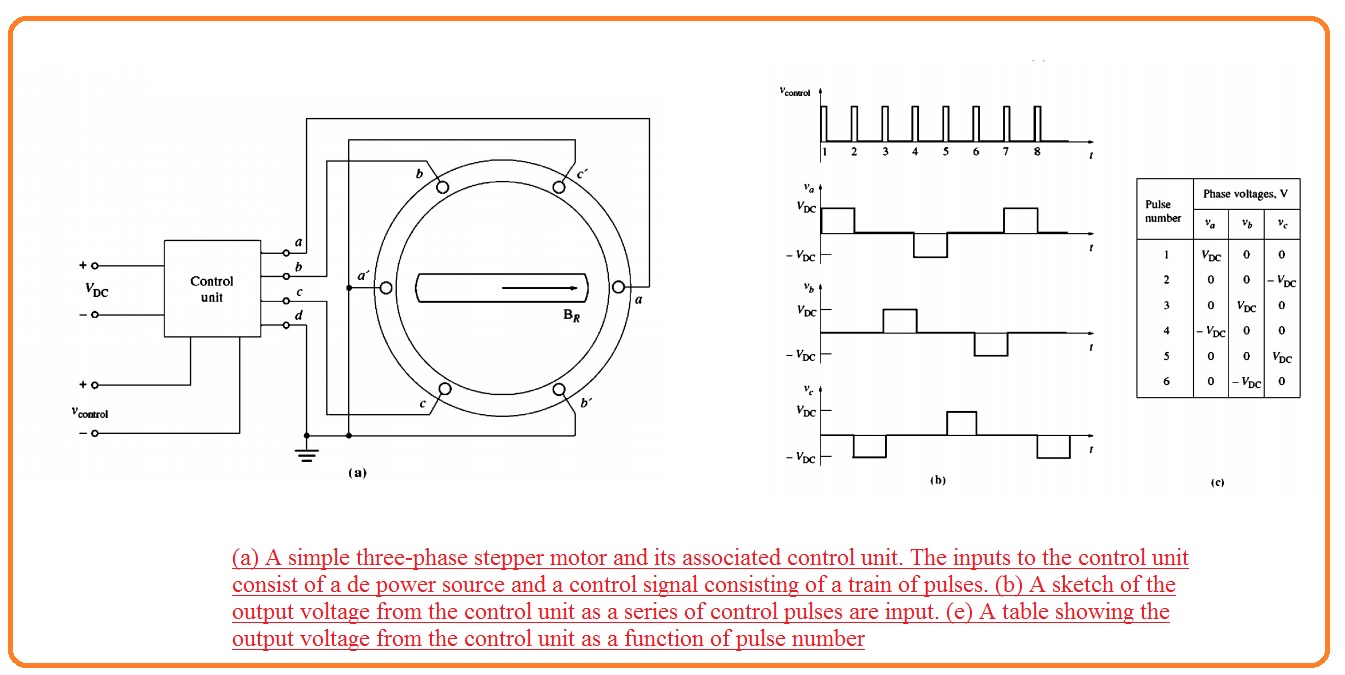
- TO get understanding the function of the stepper motor see the below figure.

- This diagram indicates that it has 2 poles three-phase stepper motor having a permanent magnet rotor.
- IIf we link dc voltage to phase a of the stator and there is zero voltage is provided at the phases b and c in results torque is produced in the rotor that results to align with the stator field Bs can see in above figure denoted as b.
- Let as supposing that phase is off and negative dc supply is provided at phase c. The new stator field is moved at sixty degrees according to last field and rotor of the motor permits to move.
- Through regulating this configuration it is certain to make a table indicating the rotating location as a function of the voltage given at the stator of the motor.
- If the voltage generated through the control unit variation through every input pulse in the configure can be seen in below table.
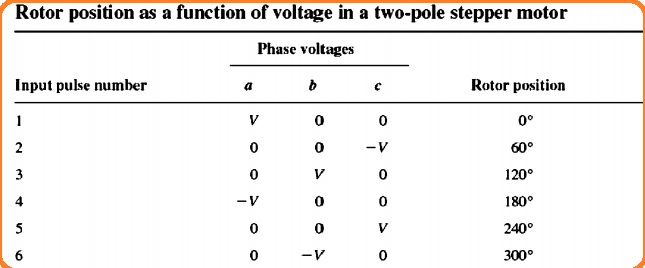
- In a result, the stepper motor will shown through sixty degrees through every input pulse.
- It is easy to create a stepper motor through accurate step dimensions by increasing the number of poles at the motor.
- According to the below equation the number of mechanical degrees is resulting to certain numbers of electrical degrees.
θm=2/pθe
- Because every step is shown in the above table respective to the sixty degrees electrical degrees the quantity of mechanical degrees moved one step degrees through rises number of poles.
- For instance, is the stepper motor has 8 poles then mechanical angles of the shaft of motor will vary through fifteen degrees per step.
- The speed of stepper motor can be corresponding to the number of pulses in its control device according to the given above equation.
- The above equation offers the mechanical angle at a stepper motor as function of an electrical angle.
- If both parts of this equation are differentiated according to time so we has o relation between the electric and mechanical rotational speed and motor.
wm=2/pwe
nm=2/pne
- As there are 6 input pulses for one electrical revolution the relation among the speed of the motor in revolution per minute and number of pulse per minute now is.
nm=1/3pnpulses——-A
- Here npulses are a number of pulses per minute.
Stepper Motor Types
- here are 2 basic categories of steep motor the main difference is that their construction-permanent magnet first one is the permanent type and the second one is reluctance motor.
- In the permanent magnet stepper motor permanent, the magnet is used and in the reluctance, category ferromagnetic rotor is used.
- The torque produced by the permanent stepper motor is a larger reluctance motor because the permanent magnet steep motor generates a torque due to two permanent fields and the reluctance factor.
- The reluctance stepper motor are generally created through 4 phase stator windings in place of 3 phase stator windings.
- The 4 phase stator windings decrease teh steps among pulses through sixty electrical degrees to forty five electrical degrees.
- The torque in the reluctance motor changes sin2∂. Therefore the reluctance torque among steps will be highest for ange of forty-five degrees.
- So the given reluctance stepper motor can generate larger torque having 4 phase stator windings than 3 phase stator windings.
- The equation denoted as A can make further simple for all stepper motors irrespective of the number of phases at their stator windings.
- In normal if the stator has N number of phases it uses 2N pulses for one electrical revolution in motor. So relation among the speed of the motor in a revolution one minute and a number of pulses per minute is now.
nm=1/Npnpulses
- a stepper motor is very helpful in control and position network since the computer linked to the motor can measure the certain and accurate location of stepper motor without getting the data from the shaft of motor.