 Hello friends, I hope all of you are fine. In today’s tutorial, we are gonna have a look at Synchronous Motor Torque-Speed Characteristic Curve. The most important feature of a synchronous motor is that it provides constant speed during its operation. The speed of the motor depends on the number of poles and frequency of the supply connected with it. Load variation in induction motor does not affect motor highly but the load variation in synchronous motor effect the working of motor greatly. Load variation produced hunting (when sudden load varied on rotor, it starts vibrating across its axis and find a new location for stability this process called Hunting) in a rotor of motor and due to this fact stability of motor also disturbs.
Hello friends, I hope all of you are fine. In today’s tutorial, we are gonna have a look at Synchronous Motor Torque-Speed Characteristic Curve. The most important feature of a synchronous motor is that it provides constant speed during its operation. The speed of the motor depends on the number of poles and frequency of the supply connected with it. Load variation in induction motor does not affect motor highly but the load variation in synchronous motor effect the working of motor greatly. Load variation produced hunting (when sudden load varied on rotor, it starts vibrating across its axis and find a new location for stability this process called Hunting) in a rotor of motor and due to this fact stability of motor also disturbs.
In today’s post, we will have a look at the relation between torque and speed of the synchronous motor and also study the effect of load variation on motor. So let’s get started with torque speed characteristics of synchronous motor
Synchronous motor torque speed curve
- Synchronous motor provides power to such loads that operate at constant speed and system.
- Mostly this motor is connected with large power systems so these power systems behave like large infinity bus bars for the motor and the variation in the motor has no effect on these bus bars.
- That means how much power motor takes from the power system there will be no effect on the frequency and output voltage of system.
- The rotating speed of motor is interlocked with the frequency of system due to this speed of the motor remains constant irrespective of load varied on a motor.
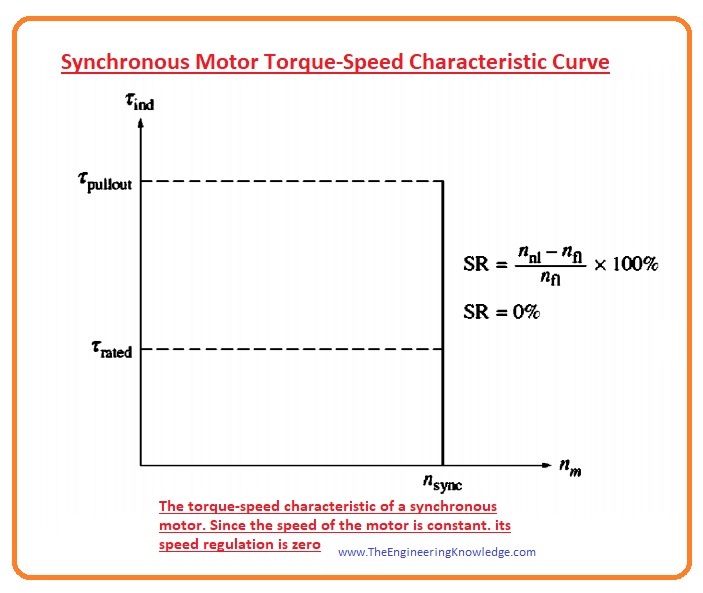
- The given figure shows a relation between the synchronous motor torque curve and synchronous motor speed connected with the large power system.
- We can see from the above-given figure that the speed of motor remains constant from no load to maximum load connected with it. The speed regulation of motor is also zero.
SR =(nnl-nfl)nfl x 100%
SR = 0%
- The equation of torque will be given as.
tind =kBRBnetsinδ
tind= (3VøEAsinδ)/wmXs
- When the angle is δ=90o then maximum torque exits. Normally torque, when a full load is connected, has very less value.
- In fact, the pullout torque can be three times the full-load torque of a motor.
- When the torque on the motor’s shaft larger than the pullout torque then the rotor will come out the effect of field of stator do not remain interlocked with it.
- When rotor gets out from the effect of stator it starts to slow down and the direction of torque produced in it also reverses and the field of stator laps it continuously.
- The resultant enormous torque produces, first in one direction and then the other direction, due to this the motor starts vibration harshly.
- The loss of harmonization (synchronization) when the pullout torque increases are called slipping poles.
The equation for a maximum of pullout torque of a motor is mentioned here.
tmax =kBRBnet
tmax= (3VøEA)/wmXs
- From these equations, we can conclude that with the increment in field current internal generated voltage EA increases that also causes to increment in the maximum torque.
- So if the motor operates at high field current then there will be high stability for the motor.
Effect of Load Changes on a Synchronous Motor
- To find the effect of load variation let’s suppose that the motor’s shaft is connected with capacitive load.
- If we increase load connected with the shaft of the motor due to an increment in load speed of rotor rotation also decreases.
- Due to this angle of torque induce also becomes larger (δ) so the torque the value of induced torque also increases.
- The increment in the value of torque induced also increases the speed of rotor again, now motor again rotating at synchronous speed but having a high value of angle of torque (δ).
- The given diagram shows the phasor diagram of load connected with the motor when there is no change in load.
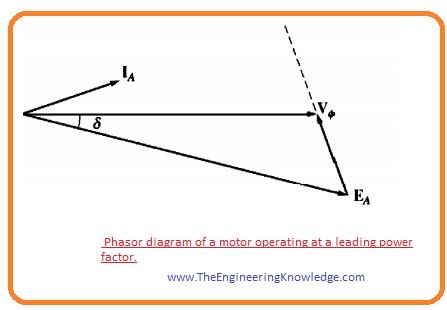
- The internal generated voltage EA of motor is (køw) in this case, so these voltages depend on the field current and rotation speed of the motor.
- As the speed control by the input supply and circuitry of field also not disturbed by any external fact so field current is also constant with the speed that is constant due to the input supply constant behavior.
- So internal generated voltage should remain constant as load varies.
- But when the load varies internal voltage (EA) abruptly decreases as shown in the given figure.
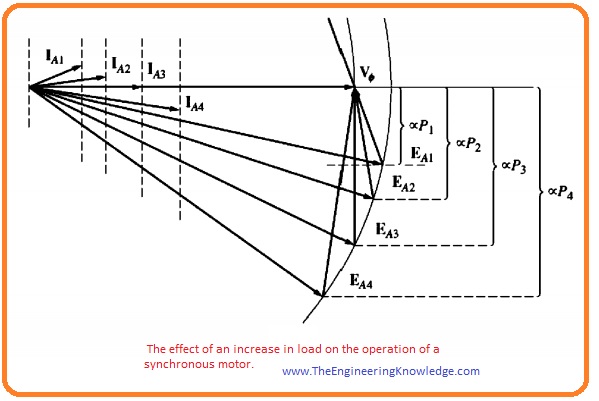
- As internal voltage decreases the jXSIA will increase to reach Vø from the EA so the value of current passing through the armature winding also increases (IA).
- You can also observe from a figure that the P.F angle (ø) also varies first it becomes less leading then more lagging.
starting torque of the synchronous motor
synchronous motors do not have starting torque and the rotor must be operated on synchronous speed by some other sources. The torque is zero because of the relative velocity between the stator and rotor MMFs is zero.
Read also:
- The characteristic of a synchronous motor is called the V curve of the motor. The characteristics curve plotted between the input power factor and field current for the constant mechanical load on the motor are the shape of V and called inverted ‘V’ curves.
- The torque and speed relationship is an inverse relation as the rated output power of the motor is a fixed value. output speed increases, output torque reduces proportionately. The output torque increases and the output speed reduces proportionately.
- It is not self start motor.
- For a given value of frequency, it works only at one speed, synchronous speed, Ns=120f/P N s = 120 f / P .
- It can work for different PF lagging and leading.
What is the torque speed curve?
- Speed torque curves are made with a spinning step motor to a known speed and slowly applying torque to the output shaft with brake and measured torque transducer. Load is slowly applied until the motor loses synchronism (stops).
- Torque is the rotational equivalence of linear force. Speed finds the distance covered in the unit time. The relation between torque and speed is inverse relation to each other. The torque of rotating bodies can mentioned ratio of power and angular velocity.
- For synchronous speed, slip is zero and torque produced with the motor is zero. For ideal motor having zero friction and zero losses, and not external load, motor can rotate for synchronous speed, since motor not produces any torque for rotation
That’s all about Synchronous Motor Torque-Speed Characteristic Curve I have mentioned each and everything related to Synchronous Motor Torque-Speed Characteristic Curve. If you have any questions and query can ask in comments. See you in the next tutorial Types of Synchronous Motor.
- I also have written some related articles you can also read them are listed here.
- Introduction to Synchronous Motor
- Synchronous Motor Torque-Speed Characteristic Curve
- Synchronous Motor Starting Method
- What is Synchronous Condenser (Capacitor)
- Synchronous Motor Power Correction.
- Types of Synchronous Motor
- Effect of Field Current Changes on a Synchronous Motor.





Good work well was written…
thanks
I am really impressed with your writing skills as well as with the layout on your weblog. Is this a paid theme or did you customize it yourself? Either way keep up the nice quality writing, it is rare to see a nice blog like this one today..
Hiya, I am really glad I’ve found this information. Today bloggers publish only about gossips and net and this is actually annoying. A good site with interesting content, this is what I need. Thanks for keeping this web site, I’ll be visiting it. Do you do newsletters? Can not find it.
thank you for sharing with us, I conceive this website genuinely stands out : D.