 Hello, fellows, I hope all of you are having fun in your life. In today’s tutorial, we will have a look at the Induction Motor Design Classes. In the last tutorial Variations in Induction Motor Torque-Speed Characteristics we have discussed that it is likely to create numerous curves of the torque and speeds of the induction motor by doing some changes in the rotor design. According to changes in different applications of the induction motor NEMA (National Electrical Manufacturers Association) in the USA and in Europe International Electro-technical Commission have defined the different design of the induction motor with numerous torque-speed Characteristics curves.
Hello, fellows, I hope all of you are having fun in your life. In today’s tutorial, we will have a look at the Induction Motor Design Classes. In the last tutorial Variations in Induction Motor Torque-Speed Characteristics we have discussed that it is likely to create numerous curves of the torque and speeds of the induction motor by doing some changes in the rotor design. According to changes in different applications of the induction motor NEMA (National Electrical Manufacturers Association) in the USA and in Europe International Electro-technical Commission have defined the different design of the induction motor with numerous torque-speed Characteristics curves.
The design refers to the NEMA and IEC are known as the classes of the motor and a specific motor can be mentioned as a design class X motor. In today’s post, we will have a look at different class’s design of induction motors and explain their different features. So let’s get started with Induction Motor Design Classes.
Induction Motor Design Classes
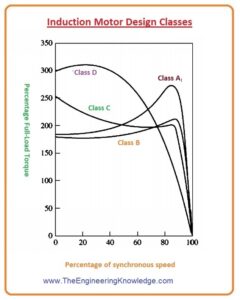
- There are four main classes of induction motor design are used that Class A, Class B, Class C, and Class D. Now we discuss all these four classes with detail and see their application, disadvantages, and benefits.
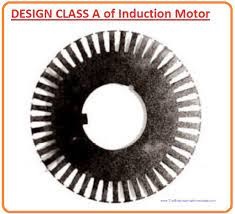
Class A of Induction Motor
Features of Design Class A of Induction Motor
- This type of design is the standard design of the induction motor that is usually used.
- It has moderate initial torque, moderate initial (starting) current and less value of the slip
- The slip for this motor should be less than five % when the motor is connected with the rated load. And the value of its slip should also less than the class B motor of a similar rating.
- The value of the maximum pullout torque for this design is two hundred to three hundred % of the full load torque, with a slip value of less than twenty %.
- In the case of the large rating motor of design A should be equal to the rated value of the torque and for small rating motors, the torque should be two percent or larger than the rated torque.
Disadvantage of DESIGN CLASS A of Induction Motor
- The main issue with this design is that it’s tremendously higher inrush current on the starting of the motor.
- During starting almost five hundred to eight hundred % of the rated current flows through this design of the motor.
- The ratings of 7.5 horsepower motors, any type of voltage regulator are connected with them to stop voltage loss issues on starting when these motors are attached to the power system.
- In the previous years, design class A motors were the standard design for mostly submissions less than 7.5 horsepower and above two hundred horsepower, but now these motor has been replaced with the class B design motors.
Applications of DESIGN CLASS A of Induction Motor
- These are some uses of class A design motor.
- It used in the fans.
- The motor of the different blowers is Class A induction motor.
- It also used in different pumps and lathe machines.
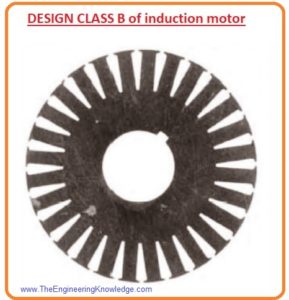
Design Class B of Induction Motor
Features of Design Class B:
- The starting current for these motors is less, the starting torque is moderate and the value of the slip is also less
- The starting torque induced by this motor is similar to the Class A motor but its starting current is almost twenty-five percent less than the starting current of Class A motor.
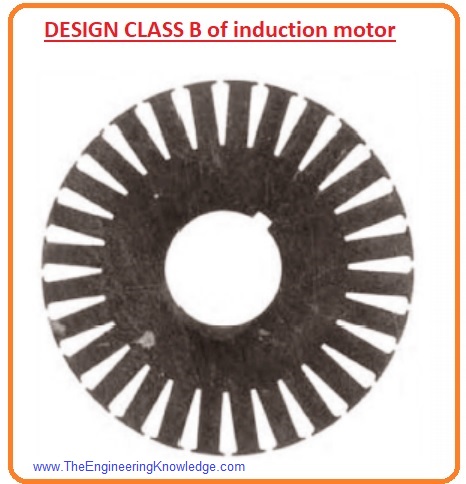
- Its pullout torque is larger or equal to the two hundred percent of the rated torque, but it is less than the pullout torque of the class A motor because its rotor reactance value is higher.
- Its rotor’s slip is less than five percent at rated load.
Application Design Class B of Induction Motor
- Its applications are almost alike to the Class A motor but it is mostly used due to its smaller starting current.
- Design class B motors have mostly swapped design class A motors in new fittings.
Design Class C Induction Motor Design
- The starting torque of Class C is higher, has less value of the initial current and the value of slip is five percent at full load.
- Its pullout torque is less than the Class A motor, but its initial torque is two hundred fifty % of the torque when full load is connected with the motor.
- These motor consists of the double cage rotor so their cost is higher than the Class A and Class B motors.

Applications Design Class C
- These motors are used where higher starting torque is required like pumps, compressors, and conveyors.
Design Class D Induction Motor
- The initial torque of this motor is almost two seventy-five percent or larger than the rated torque of the induction motor.
- Its starting current is lower but the slip is higher when it is connected with the full load.
- They are fundamentally normal class A induction motors, but with the rotor, and bars prepared lesser and with a high-resistance substance.
- The higher rotor resistance varies the largest value torque to a lesser speed. It is also likely for the extreme torque to arise at 0 speed (at a hundred % slip).
- Full-rated load slip for such motors is larger because of the large value of the resistance of the rotor.
- Its value can be seven to eleven % but can be seventeen % or larger.
Application Design Class D
- Such motors are used in submissions that need the rushing of extremely higher-inertia-kind loads, particularly larger flywheels used in punch presses.
- In these applications, such motors slowly accelerate a huge flywheel to full rated speed, which then runs the punch.
- After a punching process, the motor then re-accelerates the flywheel over a legitimately long time for the subsequent process.
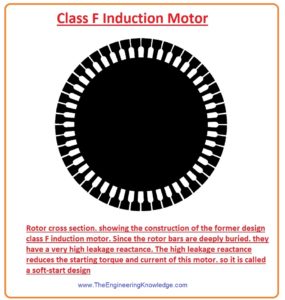
- Instead of these 4 motor designs there 2 more classes E and F that are produced by the NEMA, is known as the soft-start induction motor.
- These designs were eminent due to fewer starting currents and were used for less starting torque loads in conditions where initial currents were difficult to handle.
- These motor designs have been eliminated.

That is all about Induction Motor Design Classes if you want to know further or if something should be edited in this post can ask in the comments. Take care until the next post.
You can also read some related articles to the induction motor. That is described here.



Good day I am so delighted I found your web site, I really found you by error, while I was
browsing on Digg for something else, Anyways I am here now
and would just like to say many thanks for a remarkable post and a all round interesting
blog (I also love the theme/design), I don’t have time to read through
it all at the minute but I have book-marked it and also
added in your RSS feeds, so when I have time I will be back to read a
great deal more, Please do keep up the fantastic work.
Thanks for sharing this information.
I really wanna learn more about various types of motors, and also which one can perform perfectly for at list 12 hours with much load and without stopping ?
Please sir i really need answer i have tried different type of motor with with 2 capacitor to build a fueless generator but it always gets too hurt after pulling an 8hp flywheel for just 20-30mins, so at this stage what kinda motor will be best for this job hoping to get answer from you soon sir thanks